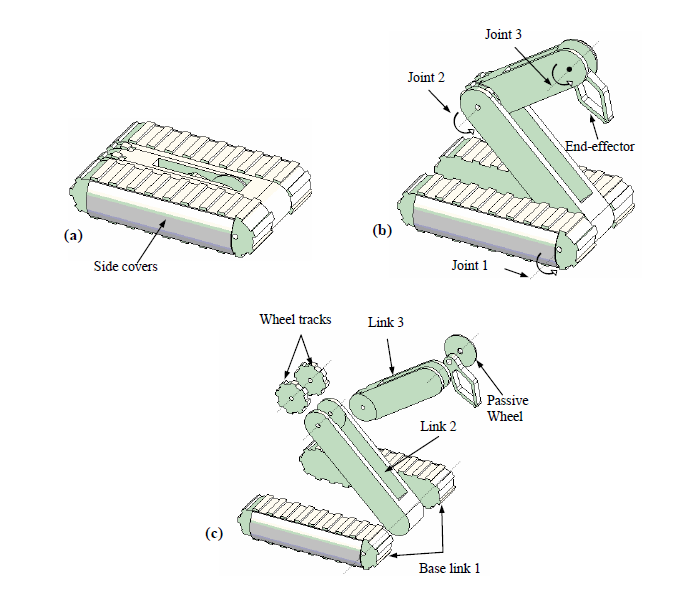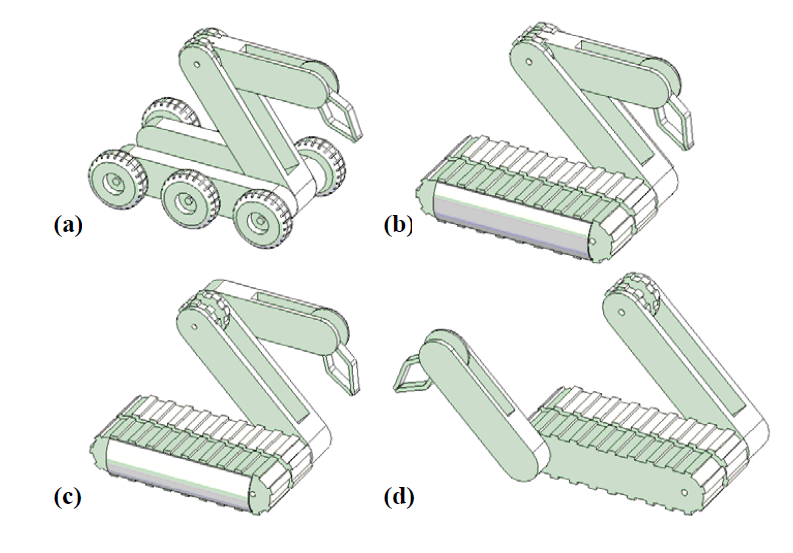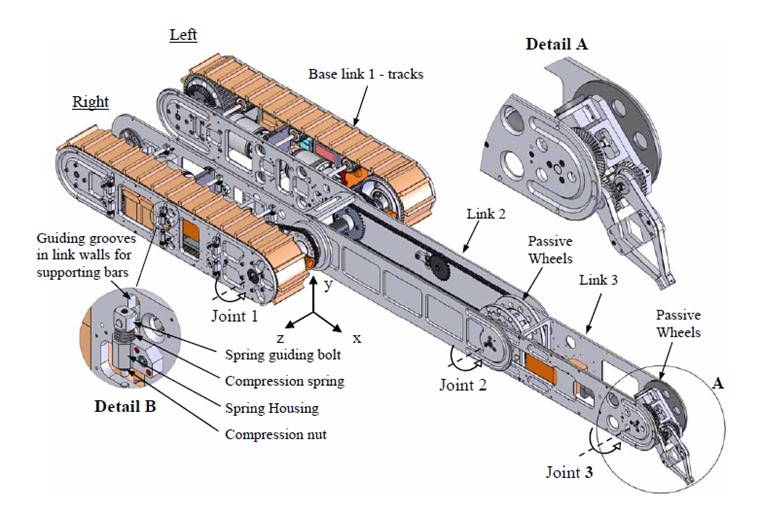
چرخهای زنجیری به منظور کاهش لغزش روی سطح گزینه ی بهتری از چرخها هستند. اما به خاطر تماس و اصطکاک زیاد بین چرخ زنجیری و زمین، ربات در عین چرخش موجب لغزش می شود. به این منظور موقعیت یابی دقیق چرخش در این نوع مکانیزمها مشکل است. در مقابل آن، قابلیت مانور خوب در مسیرهای ناهموار و نرم دارد. مدل مفهومی مکانیزم حرکتی ربات دارای دو اتصال برای چرخ های زنجیری در دو طرف، اتصال های بازویی و چرخهای زنجیری پسیو سازگار با زمین، است. همچنین اتصالات بازویی، دارای یک لینک داخل لینک اصلی (لینک3)، اند افکتور و چرخ در انتهای اتصال لینک 2 و چرخ در انتهای لینک 3، است. لینک ها می توانند به منظور سه مد استفاده شوند:
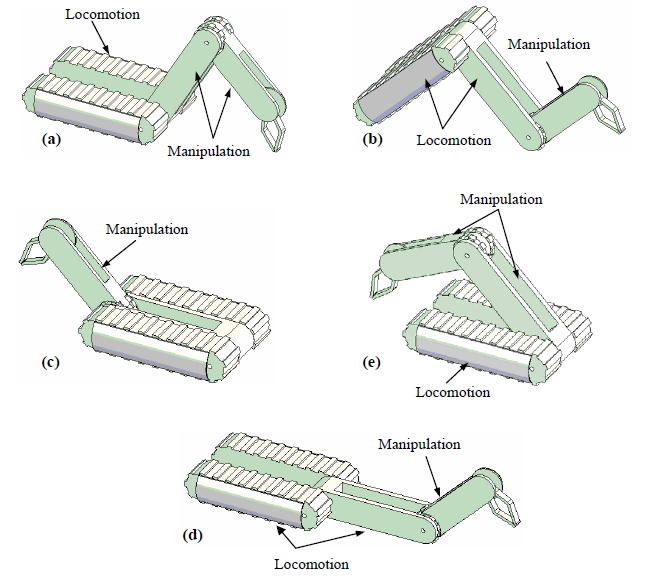
1- مد حرکت: تمام لینکها به منظور افزایش مانور حرکتی و افزایش کشش استفاده می شود.
2-مد manipulation: تمام لینکها برای انجام فعالیت manipulation به منظور بهبود عملکرد استفاده می شوند. دو لینک پایه دارای چرخ زنجیری می توانند حرکت چرخشی را برای انجام فعالیتی، ارائه دهند.
3- مدل هیبرید: ترکیبی از حالت اول و دوم است.
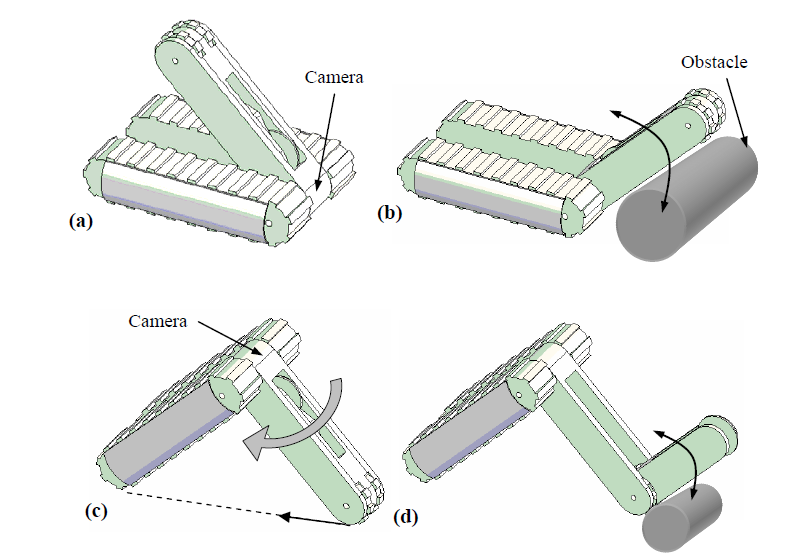
در مد اول، به منظور افزایش قدرت مانور در عبور از موانع، لینک 2 به ربات به منظور افزایش ارتفاع کمک می کند، همچنین به کمک آن می تواند از موانع بزرگ عبور کند. لینک 2 عملا وظیفه پشتیبانی چرخ های زنجیری با اتصال سه سطحی به زمین را در این مد بر عهده دارد. این را می توان با حفظ زاویه ثابت به لینک 2 و 1 در حالی که ربات در حال حرکت است، انجام دهد.
مد Manipulation، حالتهای مختلف بازوی مکانیکی برای انجام فعالیتی را نشان می دهد. به منظور ناتوانی چرخش بازوی مکانیکی، ربات به وسیله حرکت معکوس بین چرخ های زنجیری توانایی چرخش را، ارائه می دهد. در واقع بازوی مکانیکی به ربات در حرکت کمک می کند و چرخهای زنجیری برای انجام فعالیت Manipulation به بازو، برای چرخش کمک می کند.
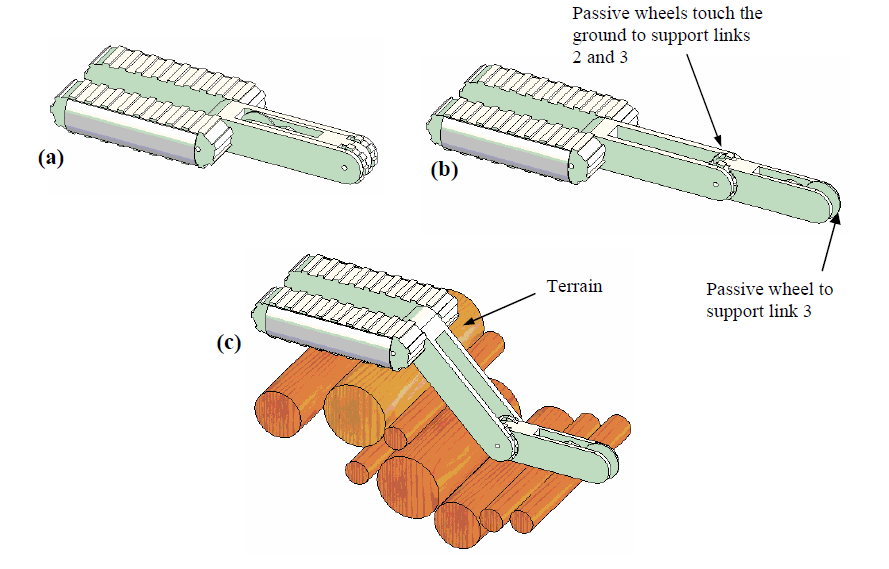
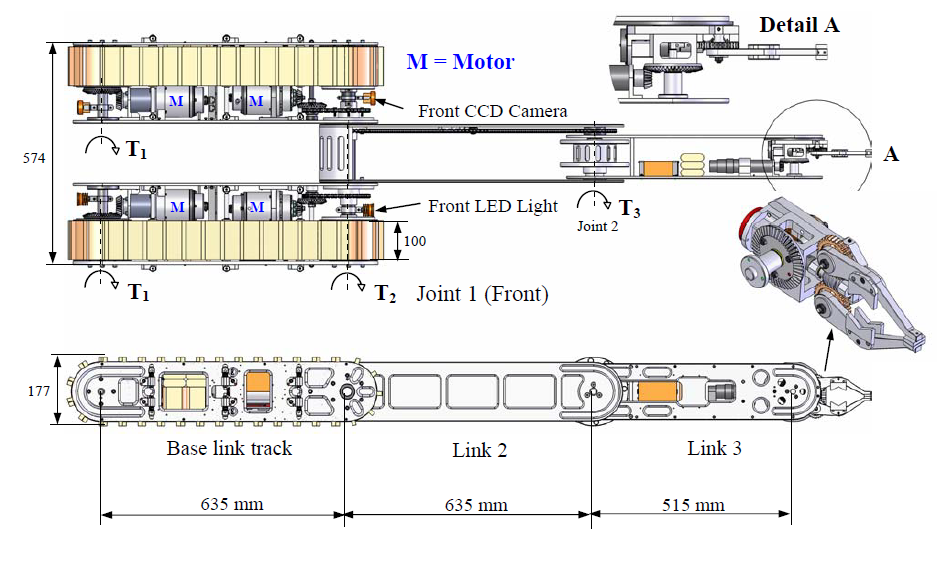
برای بهبود کشش لینک 2 به کمک چرخ های زنجیری اصلی می رود و اگر لازم باشد لینک 3 برای اتصال به سطوح پایین تر و بهبود کشش، استفاده می شود. حتی الامکان در مدل مفهومی تلاش شده است که قسمتی از ربات به صورت پسیو با زمین سازگار شود و لینک های بازوی مکانیکی به عنوان پشتیبان چرخ های زنجیری استفاده شوند. اما می توان این قابلت را به گونه ی دیگری طراحی کرد که در اشکال انتهای این مقاله قابل مشاهده است.
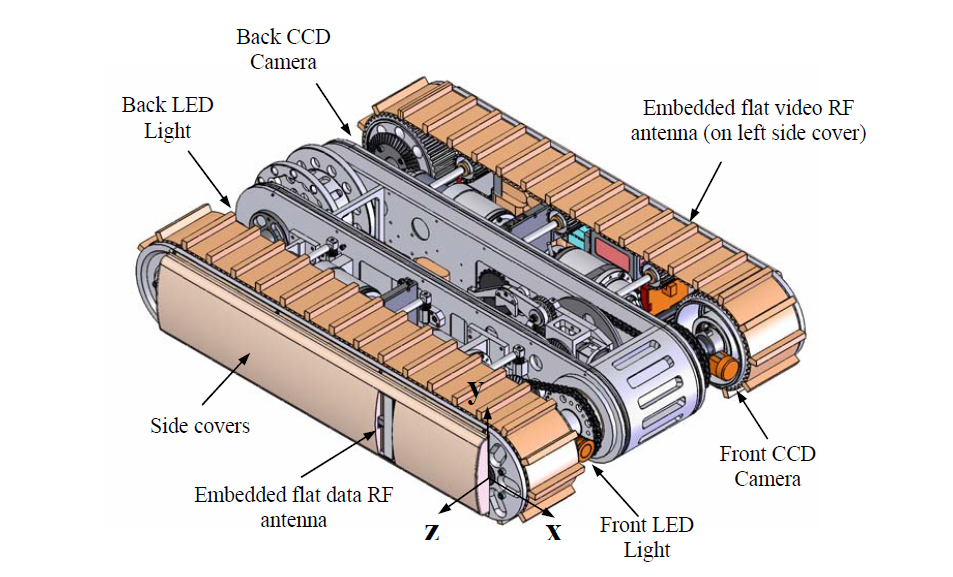
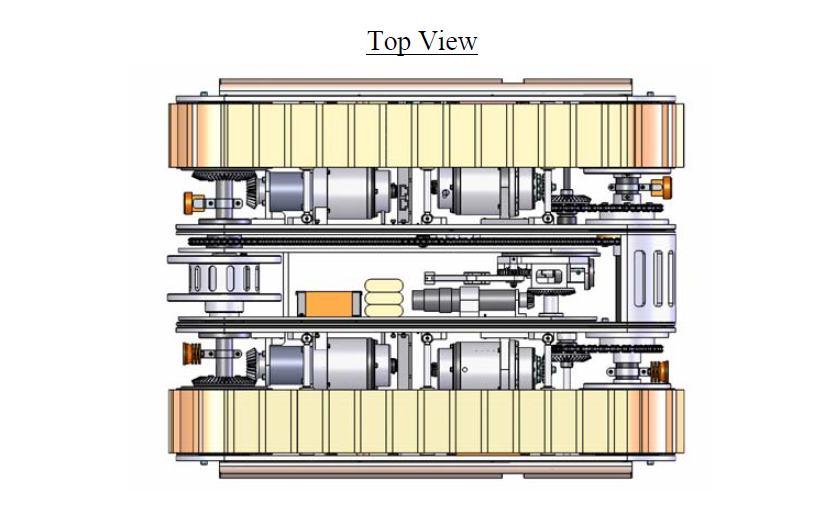
این مکانیزم هیبریدی به منظور افزایش قابلیت میکرو رباتها برای عبور از موانع بزرگ ارائه شده است. همچین مدل ارائه شده یک توسعه سیستماتیک و علمی است که به صورت سه بعدی و تجربی آزمایش شده و نتایج آن نیز قابل قبول است. این مدل می تواند یک ایده اولیه برای طراحان باشد و همچنین دیدگاه طراحان ربات را بهبود بخشد. در ادامه تصاویری از این نوع مکانیزم پیوست شده است.